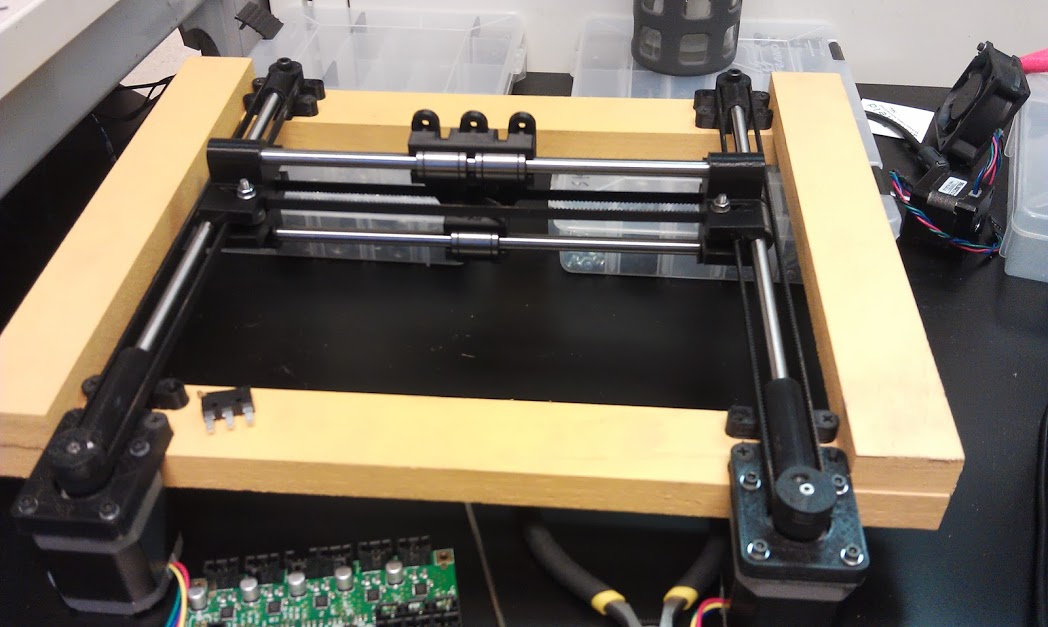
HaytchBot was designed in TextCAD, as a test of the software. At the time the RepRap community was actively exploring H-Bot and CoreXY layouts for gantries. The H-Bot layout here is the same used in the MakerBot Replicator. I performed quite a few tests on the system, but determined that H-Bot was less than ideal due to a high degree of rotational torque on the moving axis. Later at Voxel8, I successfully guided the team towards a CoreXY gantry rather than H-Bot gantry based on my experience with this system. The design was a fun exercise in minimalist design and TextCAD provided a useful level of abstraction of the implementation. The parameters for the design were quite simple and high-level specifications:
class CoreBotConfig():
def __init__(self,
buildVolume = [150, 150, 200],
stepper = ["Generic NEMA17", "Generic NEMA17", "Generic NEMA17"],
linear = ["LM8UU", "LM8UU", "LM8UU"],
bearing = ["605zz", "624zz", None],
):
https://github.com/sjkelly/haytchbot